老司机开车了!用飞桨玩AirSim智能驾驶
时间:2025-08-05 11:12:25
本文介绍如何用飞桨PARL强化学习框架在微软AirSim仿真环境实现智能驾驶。先说明环境配置,包括安装Win10、VS2019、虚幻引擎、AirSim等及验证方法;再讲用Python控制汽车的步骤;最后详述基于飞桨PARL的DQN算法实现,含代码清单、逻辑,还提及相关训练地图和视频。
老司机开车了!用飞桨玩AirSim智能驾驶
https://www.bilibili.com/video/BV1UY4y1e7s5"https://img.php.cn/upload/article/001/571/248/175367178474405.jpg" >
训练过程视频:PARL_AirSim_DQN.mp4
前言
PARL是由百度大脑出品的、高性能、易用的国产强化学习(RL)框架。
下载Visual Studio Community 2019 使用C++的桌面开发 安装组件:Window 10 SDK(10.0.18362.0)
下载Epic Game Launcher并安装4.26以上版本的“虚幻引擎”
重启Epic Game Launcher并关联项目文件
下载AirSim源代码:git clone https://github.com/Microsoft/AirSim.git
在VS 开发环境中,使用`build.cmd`命令编译本地AirSim源代码,并确保插件已正确安装和配置。
请按照以下步骤操作: 打开名为Developer Command Prompt for VS 的命令提示符。 在$ProjectRootUnrealEnvironmentsBlocks目录中,运行更新从Git.bat脚本以完成初始化。 确认弹出窗口并点击“确定”,这样当前引擎就会与之关联。 进入Blocks.sln项目文件夹,并双击打开它。这时会自动启动Visual Studio 境。 在编译选项中,选择Development Editor + Win确保能够正确运行构建过程。 点击“调试”菜单下的“开始调试”按钮,虚幻编辑器将被启动,此时建议查看教程内容。 最后一步是点击运行并选择确定。如果一切设置到位,你应该会在虚幻编辑器中看到AirSim环境的安装成功标识。
二、使用Python控制汽车
1. 配置Anaconda环境
略
2. pip安装AirSim依赖包
# 安装Unreal和python之间的通讯协议 pip install msgpack-rpc-python # 安装airsim的python库 pip install airsim登录后复制
3. 下载并安装Unreal 的 Landscape Mountains环境
请参考: 下载与安装示例章节,不再赘述。
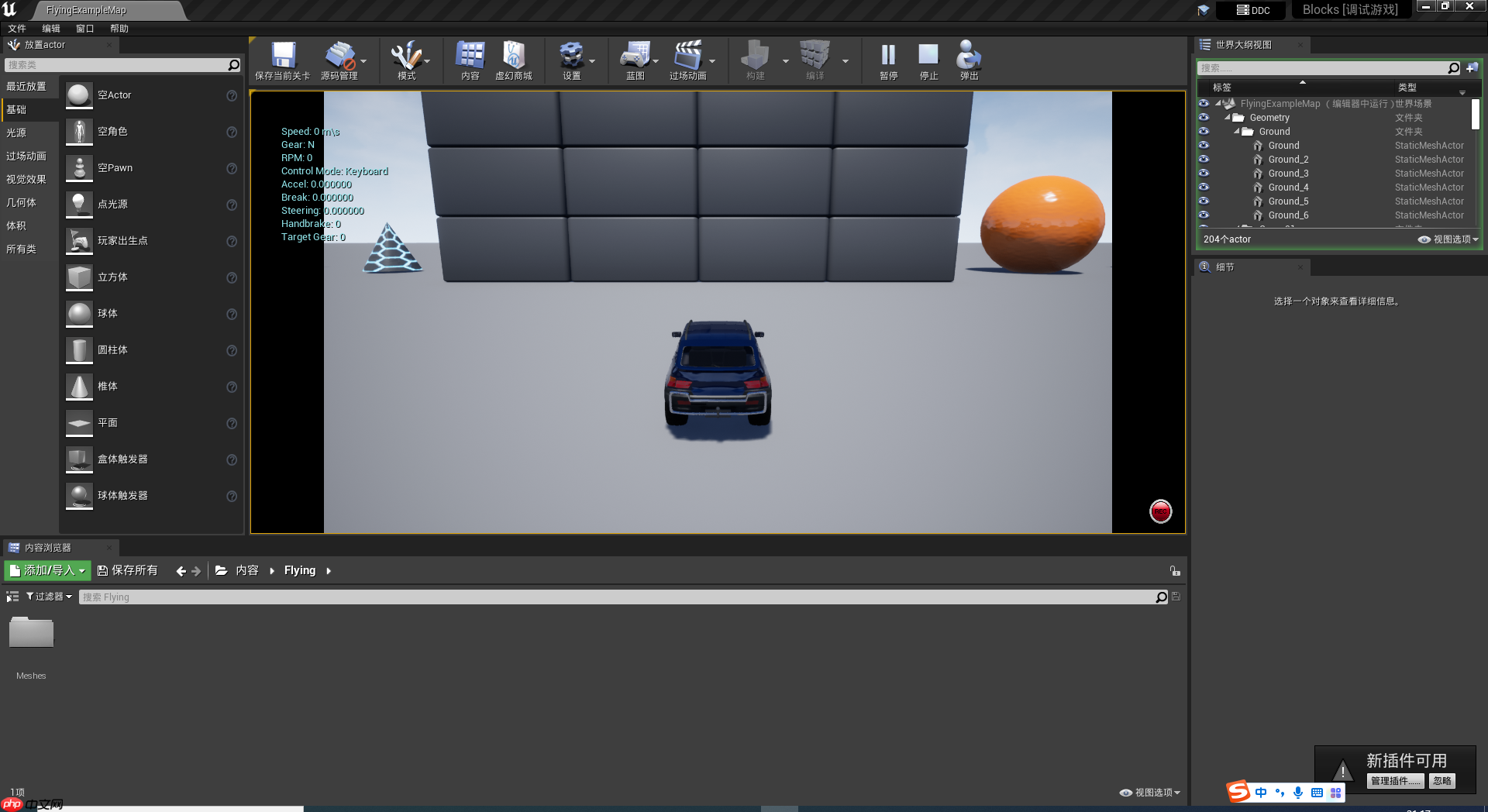
4. 启动VS Code,打开文件夹PythonClientcar,运行hello_car.py,效果如下:

三、使用飞桨PARL强化学习算法驾驶汽车
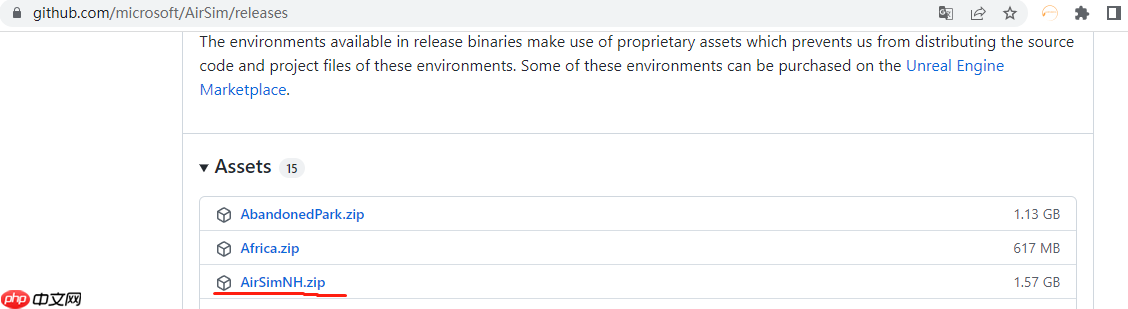
下载AirSim预编译的windows版本的训练地图:
AirSim_Paddle │ setup_path.py│ │ agent.py│ model.py│ replay_memory.py│ train.py│ └─airgym │ __init__.py │ └─envs airsim_env.py car_env.py drone_env.py __init__.py登录后复制
环境代码清单:
setup_path.py AirSim环境设置 airgym目录 __init__.pypython包配置 envs目录
airsim_env.py 基础环境配置登录后复制
car_env.py 汽车训练环境配置登录后复制
`__init__.py` python包配置登录后复制
DQN算法代码清单:
train.py: 本程序负责训练DQN模型;model.py、agent.py 和 replay_memory: 都是飞桨PARL三件套组件的一部分。其中,replay_memory 是用于记忆和重用经验的模块。
代码逻辑
启动AirSim Gym游戏场景,加载PyTorch ALPll库中的DQN算法。进行预热记忆回放,设定初始条件后,系统将自动执行行动学习过程。
在不断迭代的过程中,我们的模型通过记忆回放学习经验来提高性能。每一步,我们都会增加步数,并从最近的观测中获取作为上下文。接着,我们使用E-Greedy算法选择动作,并执行它以获得奖励。然后,我们将环境中的下一个状态、奖励和是否结束的信息添加到训练记忆回放中。每次学习时,我们会从经验回放中随机抽取一些样本进行批量处理。利用这些样本,我们可以更新我们的模型参数来改善性能。每个步骤的损失都会被记录下来,并在最终返回总奖励和步数以及平均损失后打印出来。
四、源代码和演示视频
训练视频:PARL_AirSim_DQN.mp4 完整源代码在work目录
五、项目总结
本项目在AirSim仿真环境中首次集成了飞桨PARL强化学习框架。
以上就是老司机开车了!用飞桨玩AirSim智能驾驶的详细内容,更多请关注其它相关文章!
热门推荐
-
老司机开车了!用飞桨玩AirSim智能驾驶本文介绍如何用飞桨PARL强化学习框架在微软AirSim仿真环境实现智能驾驶。先说明环境配置,包括安装Win1、VS219、虚幻引擎、AirSim等及验证方法;再
-
 云滴出行司机使用教程现在阴阳师的鬼切秋庭流枫已经上架了!如果你是游戏爱好者,想要体验这款独特的皮肤,可以根据自己的需求和喜好进行购买
云滴出行司机使用教程现在阴阳师的鬼切秋庭流枫已经上架了!如果你是游戏爱好者,想要体验这款独特的皮肤,可以根据自己的需求和喜好进行购买 -
CF千变轮回活动到底香不香 老司机带你扒一扒最近,穿越火线的老铁们热衷于刷屏的活动是千变轮回。有人表示剁手满意,但也有不少人对这个活动的性价比提出了质疑
-
cf活动绑定大区帮不了怎么办 老司机来支招,别慌别慌亲爱的CF玩家朋友们,最近CF活动绑定大区帮的话题再次成为了热搜焦点吧!是不是很多人都遇到了“无法绑定”的难题呢?别着急,炸毛的方法是不存在的
-
永劫无间装机1000,这钱花得值不值 老司机带你深扒到底嗨!最近“永劫无间装机的话题真是火爆了。搜索起来,几乎都是大神分享各种省钱又高效的配置方法。为什么大家这么关注呢?因为大家都希望用最有限的预算,获得最佳的游戏体验
-
 可以开车去各个地方的游戏有哪些 2025好玩的汽车类手游推荐小编今天为大家推荐了几款可以开车去各个地方的游戏。现在的玩家虽然工作学习繁忙,但是现在手机上已经可以驾驶着各种不一样的汽车,在大江南北任意游览闯荡
可以开车去各个地方的游戏有哪些 2025好玩的汽车类手游推荐小编今天为大家推荐了几款可以开车去各个地方的游戏。现在的玩家虽然工作学习繁忙,但是现在手机上已经可以驾驶着各种不一样的汽车,在大江南北任意游览闯荡 -
 原神刻晴和甘雨开过最猛的车 刻晴甘雨开车图福利大全一览原神刻晴和甘雨开过最猛的车:在原神手游中很多角色职业还是挺多的,当然这些角色也是玩家游戏中不能错过的。对于游戏中刻晴甘雨开车图福利大全一览,让你体验起来也是相当有特色,下面一起来看看相关的信息。
原神刻晴和甘雨开过最猛的车 刻晴甘雨开车图福利大全一览原神刻晴和甘雨开过最猛的车:在原神手游中很多角色职业还是挺多的,当然这些角色也是玩家游戏中不能错过的。对于游戏中刻晴甘雨开车图福利大全一览,让你体验起来也是相当有特色,下面一起来看看相关的信息。 -
 小米智能开关如何实现双控小米智能开关搭配具有蓝牙功能的设备,即可远程查看门锁提醒日志及状态,续航可达18个月。很多小伙伴想知道,小米智能开关如何实现双控?其实非常简单,接下来就让小编来告诉大家吧。小米智能开关实现双控教程1打开
小米智能开关如何实现双控小米智能开关搭配具有蓝牙功能的设备,即可远程查看门锁提醒日志及状态,续航可达18个月。很多小伙伴想知道,小米智能开关如何实现双控?其实非常简单,接下来就让小编来告诉大家吧。小米智能开关实现双控教程1打开 -
 爱喜易智能增压零冷水回水泵评测:让家居生活彻底告别冷水,如今有了燃气热水器和电热水器,在天气冷的时候,我们就可以用热水刷牙洗脸或者清洁餐具。但是热水器与出水口离得比较远一些,要热水就要等一段时间以后,水龙头才会出热水。这样在等待的期间所流出的水就浪费了。爱喜易智能增压零冷水回水泵套件,不需要对原水路大动干戈,就可以满足你对冷水热水的使用需求,性价比很不错,一起来看看怎么样吧~
爱喜易智能增压零冷水回水泵评测:让家居生活彻底告别冷水,如今有了燃气热水器和电热水器,在天气冷的时候,我们就可以用热水刷牙洗脸或者清洁餐具。但是热水器与出水口离得比较远一些,要热水就要等一段时间以后,水龙头才会出热水。这样在等待的期间所流出的水就浪费了。爱喜易智能增压零冷水回水泵套件,不需要对原水路大动干戈,就可以满足你对冷水热水的使用需求,性价比很不错,一起来看看怎么样吧~ -
 keep智能手环怎么开机,感兴趣的小伙伴一起看看很多小伙伴拿到keep智能手环后不知道怎么开机,今天小编就带大家一起了解一下keep智能手环怎么开机
keep智能手环怎么开机,感兴趣的小伙伴一起看看很多小伙伴拿到keep智能手环后不知道怎么开机,今天小编就带大家一起了解一下keep智能手环怎么开机 -
 小度智能音箱怎么连接手机热点 小度智能音箱如何连接手机热点先将手机和音箱连上同一个WIFI,然后将小度音箱APP的【蓝牙模式】打开,最后再打开手机蓝牙,在蓝牙设备界面找到对应的蓝牙名称连接即可。
小度智能音箱怎么连接手机热点 小度智能音箱如何连接手机热点先将手机和音箱连上同一个WIFI,然后将小度音箱APP的【蓝牙模式】打开,最后再打开手机蓝牙,在蓝牙设备界面找到对应的蓝牙名称连接即可。 -
 微信屏幕变黑了怎么调过来 智能解决微信出现问题1、进入手机设定-应用程序管理器-已下载-点击出现问题的应用-清除数据尝试。2、卸载客户端重新安装尝试。3、更新下手机系统版本尝试是否有改善。4、备份手机数据恢复出厂设置。5、如果恢复出厂后问题依旧无法解决,将手机送至就
微信屏幕变黑了怎么调过来 智能解决微信出现问题1、进入手机设定-应用程序管理器-已下载-点击出现问题的应用-清除数据尝试。2、卸载客户端重新安装尝试。3、更新下手机系统版本尝试是否有改善。4、备份手机数据恢复出厂设置。5、如果恢复出厂后问题依旧无法解决,将手机送至就 -
 特斯拉 Robotaxi 即将登陆加州,官方信息暗示安全员需坐在驾驶位新近消息,近期,特斯拉为Robotaxi应用程序用户提供了一份神秘信息,表明了其Robotaxi平台在加利福尼亚州的扩张计划已经紧锣密鼓地进行
特斯拉 Robotaxi 即将登陆加州,官方信息暗示安全员需坐在驾驶位新近消息,近期,特斯拉为Robotaxi应用程序用户提供了一份神秘信息,表明了其Robotaxi平台在加利福尼亚州的扩张计划已经紧锣密鼓地进行 -
汽车辅助驾驶功能失灵,法院判车企退还消费者购车价款,湖南省怀化市鹤城区人民法院审结了一起涉及辅助驾驶功能的典型案例。一名司机在购买新车时被销售人员夸大了车辆辅助驾驶功能的存在,并认为其能够自动刹停
-
 5个驾驶模式怎么选?小米汽车回应YU7驾驶模式区别,小米汽车在小米汽车答网友问(第)中详细解答了关于小米yu几种驾驶模式有何区别?的问题。小米YU7近日获悉,小米YU有驾驶模式与场景选项,可自由调控动力响应、转向
5个驾驶模式怎么选?小米汽车回应YU7驾驶模式区别,小米汽车在小米汽车答网友问(第)中详细解答了关于小米yu几种驾驶模式有何区别?的问题。小米YU7近日获悉,小米YU有驾驶模式与场景选项,可自由调控动力响应、转向 -
 自由驾驶汽车手机游戏有哪些 2025最经典的自由驾驶游戏为玩家带来了一种全新的体验,让你可以自由地在开放的世界中驾驶汽车。这些游戏打破了传统竞速游戏的限制,将探索的乐趣与真实的物理反馈完美结合
自由驾驶汽车手机游戏有哪些 2025最经典的自由驾驶游戏为玩家带来了一种全新的体验,让你可以自由地在开放的世界中驾驶汽车。这些游戏打破了传统竞速游戏的限制,将探索的乐趣与真实的物理反馈完美结合